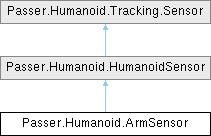
An sensor used on the arm of a humanoid.
|
| virtual void | CheckSensor (HandTarget _handTarget) |
| | Checks if a sensorComponent is present and will create one if it does not exist.
|
| |
|
virtual void | Init (HandTarget handTarget) |
| |
| override void | Start (HumanoidControl _humanoid, Transform targetTransform) |
| |
|
void | InitController (SerializedProperty sensorProp, HandTarget handTarget) |
| |
|
void | RemoveController (SerializedProperty sensorProp) |
| |
|
void | CheckSensorTransform (Transform targetTransform, bool isLeft) |
| |
|
virtual void | CreateSensorTransform (Transform targetTransform, bool isLeft) |
| |
| override void | SetSensor2Target () |
| |
|
virtual void | SetSensor2Target (Vector3 targetPosition, Quaternion targetRotation) |
| |
|
float | ArmConfidence (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | Vibrate (float length, float strength) |
| |
|
virtual void | CheckSensorTransform () |
| |
| override void | Update () |
| | Update the sensor state.
|
| |
|
virtual void | UpdateSensorTransformFromTarget (Transform targetTransform) |
| |
|
virtual void | Stop () |
| |
|
virtual void | RefreshSensor () |
| |
|
virtual void | ShowSensor (HumanoidTarget target, bool shown) |
| |
|
|
virtual HandSkeleton | FindHandSkeleton (bool isLeft) |
| |
|
virtual HandSkeleton | CreateHandSkeleton (bool isLeft, bool showRealObjects) |
| |
|
virtual void | CreateSensorTransform (string resourceName, Vector3 sensor2TargetPosition, Quaternion sensor2TargetRotation) |
| |
|
void | UpdateArm (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
void | UpdateShoulder (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateUpperArm (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateForearm (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateHand (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateHandTargetTransform (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateFingers (Humanoid.Tracking.ArmSensor armSensor) |
| |
|
virtual void | UpdateHandFromSkeleton () |
| |
|
virtual void | UpdateThumbFromSkeleton () |
| |
|
void | UpdateIndexFingerFromSkeleton () |
| |
|
void | UpdateMiddleFingerFromSkeleton () |
| |
|
void | UpdateRingFingerFromSkeleton () |
| |
|
void | UpdateLittleFingerFromSkeleton () |
| |
|
virtual void | UpdateFingerBoneFromSkeleton (Transform targetTransform, Finger finger, FingerBone fingerBone) |
| |
|
virtual void | CreateSensorTransform () |
| |
|
void | CreateSensorTransform (Transform targetTransform, string resourceName, Vector3 _sensor2TargetPosition, Quaternion _sensor2TargetRotation) |
| |
|
void | RemoveSensorTransform () |
| |
|
void | UpdateSensorTransform (Tracking.Sensor sensor) |
| |
|
virtual void | UpdateTargetTransform () |
| |
|
virtual void | UpdateTarget (HumanoidTarget.TargetTransform target, Transform sensorTransform) |
| |
|
virtual void | UpdateTarget (HumanoidTarget.TargetTransform target, SensorComponent sensorComponent) |
| |
|
Vector3 | GetTargetPosition (Transform sensorTransform) |
| |
|
Quaternion | GetTargetRotation (Transform sensorTransform) |
| |
|
void | UpdateSensor () |
| |