 |
Humanoid Control for Unity v4
|
Loading...
Searching...
No Matches
|
Humanoid Control for Unity v4
|
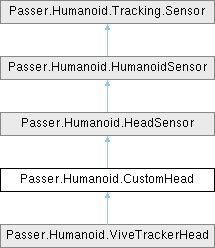
A custom sensor used on the head of a humanoid.
This tracking option supports a custom developed SensorComponent for the head.
Public Types | |
| enum | ID { Head , LeftHand , RightHand , Hips , LeftFoot , RightFoot , Tracker1 , Tracker2 , Tracker3 , Tracker4 , Count } |
Public Member Functions | |
| override void | Start (HumanoidControl _humanoid, Transform targetTransform) |
| Prepares the head for tracking with the tracked sensor. | |
| override void | Update () |
| Updates the head target based on the status of the tracke sensor. | |
| virtual void | CheckSensor (HeadTarget headTarget) |
| virtual void | Init (HeadTarget headTarget) |
| void | InitController (SerializedProperty sensorProp, HeadTarget target) |
| void | RemoveController (SerializedProperty sensorProp) |
| virtual void | CheckSensorTransform () |
| virtual void | SetSensor2Target () |
| virtual void | UpdateSensorTransformFromTarget (Transform targetTransform) |
| virtual void | Stop () |
| virtual void | RefreshSensor () |
| virtual void | ShowSensor (HumanoidTarget target, bool shown) |
Public Attributes | |
| Vector3 | sensor2TargetPosition |
| Quaternion | sensor2TargetRotation |
| DeviceView | device |
| The device to which the sensor belongs. | |
| Tracker.Status | status = Tracker.Status.Unavailable |
| Status of the sensor. | |
Static Public Attributes | |
| const string | _name = "" |
Protected Member Functions | |
| virtual void | CreateSensorTransform (string resourceName, Vector3 sensor2TargetPosition, Quaternion sensor2TargetRotation) |
| virtual void | CreateSensorTransform () |
| void | CreateSensorTransform (Transform targetTransform, string resourceName, Vector3 _sensor2TargetPosition, Quaternion _sensor2TargetRotation) |
| virtual void | UpdateNeckTargetFromHead () |
| void | RemoveSensorTransform () |
| void | UpdateSensorTransform (Tracking.Sensor sensor) |
| virtual void | UpdateTargetTransform () |
| virtual void | UpdateTarget (HumanoidTarget.TargetTransform target, Transform sensorTransform) |
| virtual void | UpdateTarget (HumanoidTarget.TargetTransform target, SensorComponent sensorComponent) |
| Vector3 | GetTargetPosition (Transform sensorTransform) |
| Quaternion | GetTargetRotation (Transform sensorTransform) |
| void | UpdateSensor () |
Static Protected Member Functions | |
| static Vector3 | TransformPointUnscaled (Transform transform, Vector3 position) |
Properties | |
| override string | name [get] |
| override HumanoidTracker | tracker [get] |
| HeadTarget | headTarget [get] |
| HumanoidControl | humanoid [get] |
| Vector | localSensorPosition [get] |
| Rotation | localSensorRotation [get] |
| Vector | sensorPosition [get] |
| Rotation | sensorRotation [get] |
| float | positionConfidence [get] |
| float | rotationConfidence [get] |
|
virtual |
Prepares the head for tracking with the tracked sensor.
| _humanoid | The humanoid for which this head is tracked |
| targetTransform | The transform of the head target |
It will initialize the sensor2TargetPosition and sensor2TargetRotation values. It will determine whether the sensor should be shown and rendered. It will start the tracking of the sensor.
Reimplemented from Passer.Humanoid.HumanoidSensor.
|
virtual |
Updates the head target based on the status of the tracke sensor.
Reimplemented from Passer.Humanoid.Tracking.Sensor.